
[服务开发团队Byungin Kim]
特斯拉最近决定发布在北美销售的 Model 3 和 Model Y 的雷达。由于 LiDAR 已经被排除在外,我们宣布自动驾驶将仅通过安装在汽车上的摄像头和 AI 技术来实现。
到目前为止,激光雷达和雷达传感器都被认为是自动驾驶必不可少的,大多数自动驾驶汽车都在努力通过正确使用雷达、激光雷达和摄像头来实现安全的自动驾驶。
下面是雷达和激光雷达的简要说明。
雷达
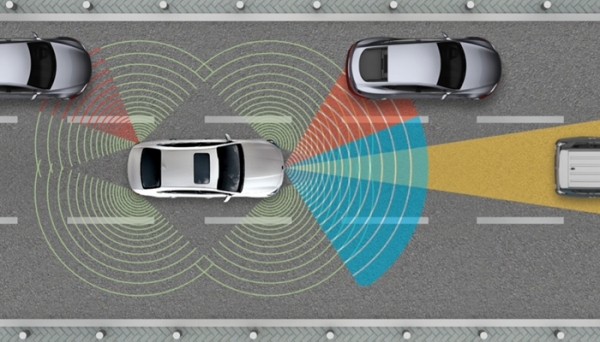
雷达是一种基于电磁波的传感器。 电磁波可以通过分析撞击物体、反射和返回的电磁波来测量到物体的距离和测量物体的方向,并且受周围环境的影响较小。
激光雷达
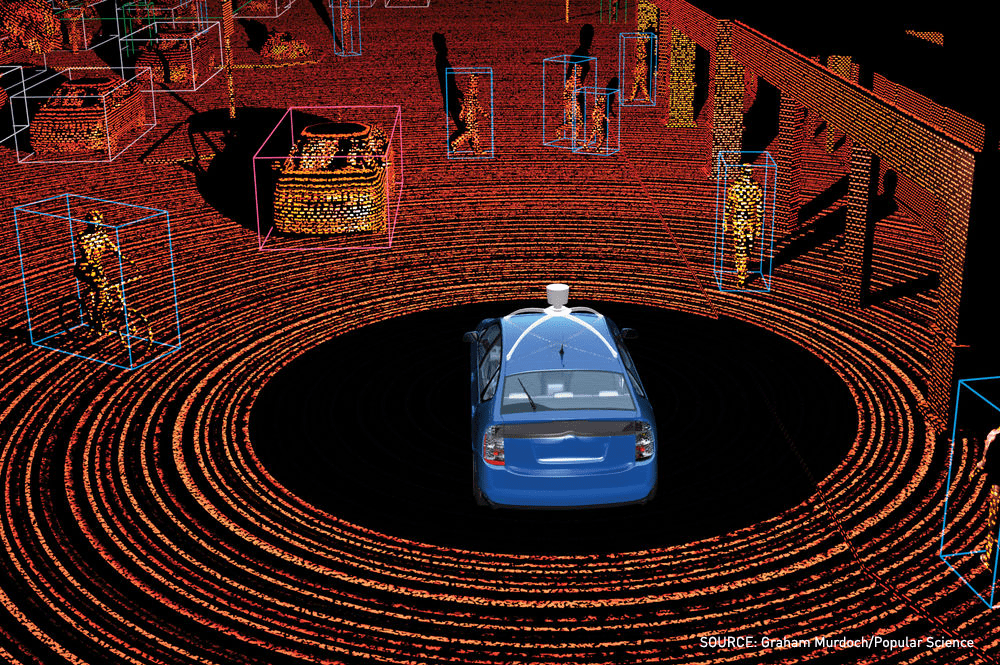
LiDAR 是一种系统,它通过测量发射激光脉冲并将其返回以进行反射所需的时间来测量反射器的位置坐标和距离。由于是通过直接拍摄光线进行测量,因此对黑暗的影响很小,可以准确识别周围的形状。
特斯拉愿景
在前几天的 AI Day 上,有一篇关于 Tesla Vision 由 8 个摄像头和没有雷达传感器的神经网络处理驱动的结构解释。
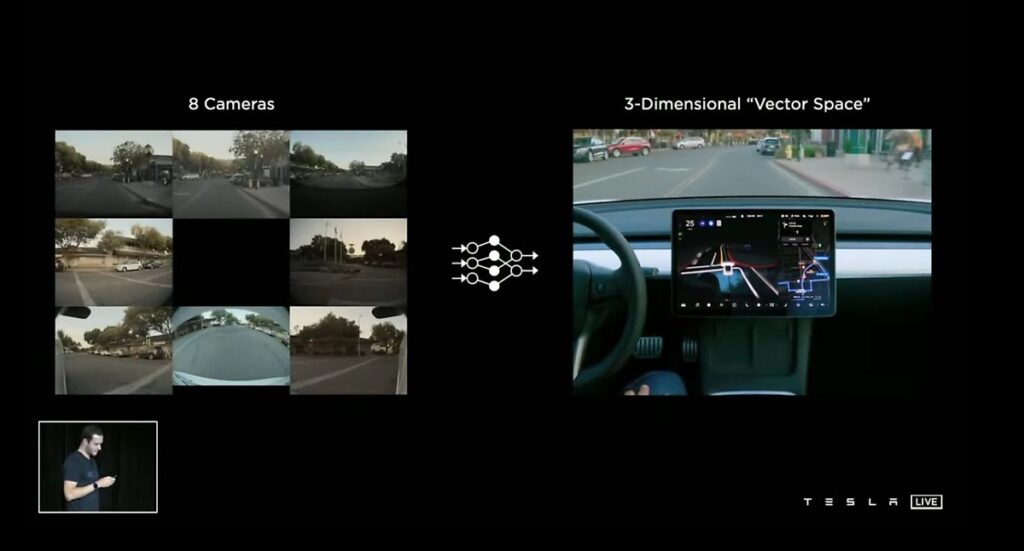

第一张图片显示了安装在车辆上的八个摄像头拍摄 360 度照片,并将它们转换为安装在驾驶员座椅旁边的监视器上的 3D 矢量空间。
一位自动驾驶负责人解释说,特斯拉的人工智能就像特斯拉的神经网络技术识别和判断雪路的环境和情况一样。目前,特斯拉开发了一种神经网络系统,在增加向量空间的同时提高了精度,这是现有 FSD 的弱点,并简化了相机校准和缓存等所有任务。 “神经网络证明了它的技术实力,它表明它可以在驾驶时有效地实时绘制地图,”Carpati 说,并自信地说,它显示出与通用汽车的驾驶辅助系统“Super Cruise”和 Waymo 的巨大差异。这些竞争对手解释说,与特斯拉不同,他们坚持预制图策略。
正如特斯拉在AI日宣布的那样,未来实际驾驶的结果是否单单摄像头就能表现出超越现有自动驾驶的性能。






